



Ngophuhliso oluqhubekayo lwe-automation ye-automation kunye ne-intellectualization, amashishini awasekho kuphela kuphuculo oluzenzekelayo kunye nokuguqulwa komgca wemveliso omnye okanye indawo yokugcina impahla. Ke ngoko, ulungelelwaniso lwesityalo sonke siyakhawuleza, kwaye ixesha lolungiselelo olukhulu luyeza. Nangona kunjalo, kwipatheni yemarike yerobhothi yangoku, ngenxa yokungabikho kophuhliso loshishino, kunzima kakhulu kumenzi omnye ukuba agqibe ngokuzimeleyo ishishini elipheleleyo lomgca wokuvelisa, ukugcinwa kunye nomgca wecala lokugcinwa kwecala. Ke ngoko, ukudityaniswa okuthe nkqo kunye nokuthe tye kuye kwaba lukhetho olucwangcisiweyo lwabavelisi beerobhothi ezininzi eziphathwayo kweli nqanaba.

Intsebenziswano yobuchule phakathi kwe-HEGERLS kunye ne-Hairou kwizinto ezintsha
Kwiminyaka yakutshanje, i-Hebei Walker Metal Products Co., Ltd. (i-brand self owned: HEGERLS) kunye ne-Hairou Innovation babhengeze intsebenziswano yobuchule, kwaye ngokudibeneyo basungula iteknoloji yokuqala ye-laser SLAM multi-layer bin picking AGV robot, ukudala iqabane elingcono kakhulu Indawo yokugcina icala yomzi-mveliso, ukuvula ixesha elitsha lokuphathwa kwemizi-mveliso, kunye nokwenza ngokudibeneyo uphuculo lweshishini lolungiselelo olukrelekrele.

Malunga neHebei Walker Metal Products Co., Ltd. [Ibhrendi eyakhe: HEGERLS]
Yasekwa ngo-1996, i-Hebei Walker Metal Products Co., Ltd. yinkampani yokuqala eyayizibandakanya kwishishini leshelufu eMntla China. Kwi-1998, yaqala ukuthatha inxaxheba ekuthengisweni nasekufakweni kwezixhobo zokugcina iimpahla kunye nezixhobo. Emva kweminyaka engaphezu kwama-20 yophuhliso, iye yaba ngumboneleli wenkonzo ohlangeneyo onesitophu esinye sogcino kunye nolungiselelo oludibanisa uyilo lweprojekthi yokugcina iimpahla kunye nolungiselelo lweprojekthi, izixhobo kunye nokuveliswa kwamaziko, ukuthengisa, ukudibanisa, ukufakela, ukugunyazisa, uqeqesho lwabasebenzi bolawulo lwendawo yokugcina impahla, emva- inkonzo yokuthengisa, njl., kwaye ikwalishishini lobugcisa obuphezulu obugxile kwimveliso ekrelekrele kunye nolungiselelo olukrelekrele. Ishishini layo ligubungela iishelufu zokugcina iimpahla: iishelufu ze-shuttle racks, ishelufu ye-beam enqamlezayo, ishelufu ye-stereoscopic yokugcina, ishelufu ye-attic, ishelufu yomgangatho, ishelufu ye-cantilever, ishelufu ehambayo, ishelufu etyibilikayo, idrayivu kwishelufu, ishelufu yomxhuzulane, ishelufu ephakathi, ishelufu eshinyeneyo, iqonga lentsimbi, i-anti-corrosion. ishelufu, njl. Indawo yokugcina istereoscopic: indawo yokugcina ishuttle stereoscopic, iplanga yestereoscopic yokugcina, iattic stereoscopic warehouse, umgangatho wodidi lwestereoscopic warehouse, cantilever stereoscopic warehouse, mobile stereoscopic warehouse, fluest stereoscopic warehouse, drive in stereoscopic stereoscopic, etc Izixhobo zokugcina ezihlakaniphile: imoto ye-shuttle, i-shuttle-way-way, i-shuttle ye-four-way, i-stacker, i-sub main car, i-elevator, i-intelligence yokuhambisa kunye nenkqubo yokuhlela, ibhokisi yokuguqula, i-pallet, i-cage yokugcina, umlawuli we-AMR jikelele, i-forklift ezenzekelayo, njl. Ukugcinwa kwenkqubo kunye nenkqubo yokugcina kunye nezisombululo: iloli yeshuttle + i-forklift, i-shuttle truck + stacker, i-sub bus + elevator, iilori ezihamba ngeendlela ezine, i-AS / RS stacker, uthutho olukrelekrele kunye nenkqubo yokuhlela, isoftware yenkqubo yeshishini ebonakalayo kunye nesisombululo sombono okrelekrele, ukubonelela. izisombululo zokumisa enye kunye neenkonzo kubathengi kuwo onke amashishini, kunye nokukhuthaza inguqu kunye nokuphuculwa kolwazi lwemizi-mveliso, ukufakwa kwidijithali kunye nobukrelekrele.
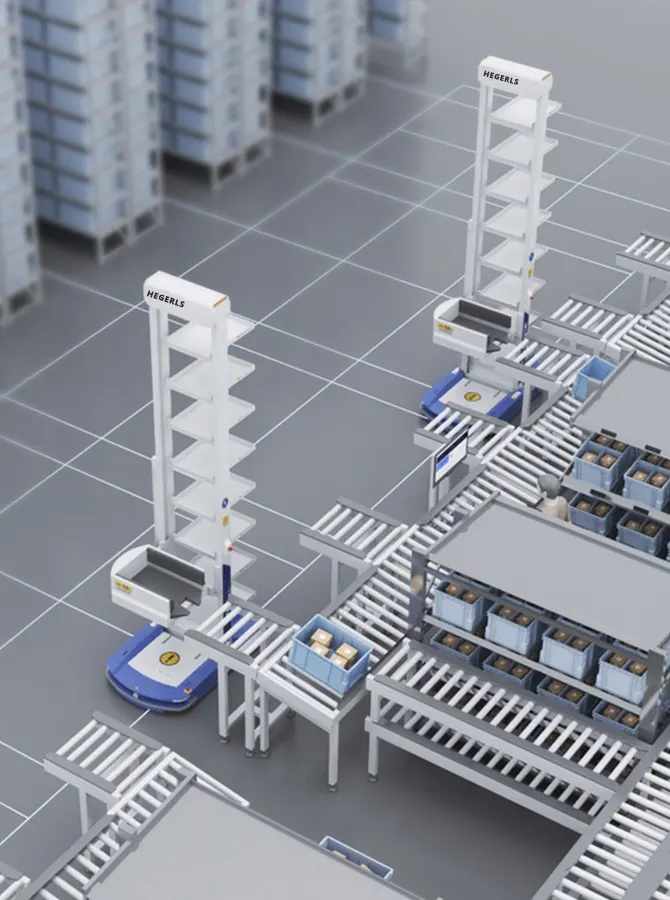
I-HEGERLS-i-laser SLAM ye-multi-layer bin yokuchola irobhothi ye-AGV
Itekhnoloji yokuqala ye-laser SLAM ye-multi-layer bin picking AGV irobhothi, ephuhliswe ngokudibeneyo yi-HEGERLS kunye ne-Hairou Innovation, inokuqonda ukuhamba kwe-laser SLAM. Ixhotyiswe ngesilawuli esingundoqo se-SRC, kwaye ineembalasane ezine zokusebenza. Idibanisa ukuhamba, ukhuseleko, kunye nemisebenzi emininzi. Iqaphela i-docking eguquguqukayo, ukukhetha ngokuchanekileyo kunye nokubeka, kunye nokuphatha ngokufanelekileyo. Iba lelona qabane lilungileyo lendawo yokugcina impahla esecaleni, ivumela ukwenziwa ngobukrelekrele. Kwiminyaka yakutshanje, le robhothi intsha iye yatsala ingqalelo yamashishini amakhulu naphakathi, kwaye uninzi lwawo luyisebenzisile, nto leyo eye yanconywa ngamxhelo-mnye kwaye yathandwa.
I-SLAM (i-Localization ngexesha elinye kunye nemephu) ibizwa ngokuba yi-real-time positioning kunye ne-map building technology. Irobhothi inemisebenzi yokuchola nokuphatha ngobukrelekrele, ukuhamba ngokuzimeleyo, ukuphepha imiqobo esebenzayo kunye nokutshaja ngokuzenzekelayo. I-laser SLAM iskena i-contour yokusingqongileyo ukwakha imephu yelifu lendawo, kwaye emva koko itshatise imephu yelifu yenqaku eyakhiweyo kunye nelifu lexesha lokwenyani eliskenwe ngelaser ukuze libekwe kunye nokuhamba. I-laser ye-laser ye-laser SLAM ye-multi-layer material box pick latent AGV irobhothi yibhokisi yokugcinwa kwebhokisi ephezulu yokusebenza edityaniswe nesoftware ephucukileyo kunye nobuchwepheshe behardware. Yenzelwe ngokukodwa umgca wecala lendawo yokugcina, kwaye isebenzisa itekhnoloji yokukhangela i-laser SLAM ukuphumeza indawo echanekileyo. Itekhnoloji ye-laser ye-laser SLAM ye-multi-layer material box echola i-latent AGV irobhothi inokuqhubela phambili nasemva, kwaye inokujikeleza kuyo nayiphi na i-engile kwindawo. Ngelo xesha, ineempawu zokuzinza okuphezulu kunye nokusebenza okuchanekileyo. Imodyuli yokukhusela umqobo okhuselekileyo kunye nemilinganiselo yokukhusela esebenzayo kunye ne-passive yokukhusela i-robot inokuqonda ukuhlukana komntu kunye nomatshini. Xa abantu bengena ngengozi kwindawo yerobhothi, banokuchonga ngobukrelekrele, i-alam kwaye baqonde ukhuseleko lokuvala. Ukongeza, inkqubo yesoftware ehambelana nethekhnoloji yoshishino laser SLAM multi-layer bin picking latent AGV irobhothi inokusingatha iimfuno ezikhutshwe ziinkqubo ezinxulumene neshishini, olulunge kakhulu kulawulo olubhetyebhetye lweendawo zokugcina izinto ezisecaleni. Inkqubo yesoftware isebenza ngokuzenzekelayo kwaye iqokelele ulwazi oluphathekayo kuyo yonke inkqubo, ngokuchanekileyo nangokufanelekileyo iphumeza ukufumana kunye nokuthunyelwa, imiyalelo yokukhethwa kunye nokusasazwa, iqonda ulawulo olukrelekrele lwendawo yokugcina icala, iqonda ukukhethwa ngokucwangcisiweyo kwempahla kwindawo yokugcina kunye ukugcinwa ngokuchanekileyo kweebhetshi zeempahla, kwaye inceda abathengi bafezekise imveliso ebhityileyo.

I-HEGERLS-i-laser SLAM ye-layer multi-layer picking irobhothi ye-AGV igxile ekusombululeni iintlungu zokugcina
❑ Uyilo olubalaseleyo lomntu
Itekhnoloji ye-laser SLAM ye-laser ye-multi-layer yebhokisi yemathiriyeli echola i-latent ye-AGV irobhothi ithatha uyilo olungaphaya kobuntu ukuphumeza ukunyuswa kwasimahla kwe-0.4 m~1.86 m, ukuziqhelanisa nemo yokusebenza yesandla, bhetyebhetye ifanise ubude bomsebenzi omninzi, dala amava okusebenza kakuhle, kunye nokwenza umntu- ukusebenzisana kwekhompyuter kunobuhlobo ngakumbi.
❑ Usasazo olubhetyebhetye kakhulu
Ukuphendula kwimeko yokusebenza eguqukayo, itekhnoloji ye-laser SLAM yomgqomo we-multi-layer picking latent AGV irobhothi ilungelelanisa utshintsho oluguquguqukayo lwendawo yokusebenza, ngaphandle kokukhangela ikhowudi enemigangatho emibini, iqhekeza izithintelo zomgca wokudityaniswa kwesiqhelo, kwaye iqonda ukwenziwa kwezinto kunye bhetyebhetye ukwenza ukuvelisa ngobukrelekrele.
❑ Idokhi ebhetyebhetye kakhulu
Ishishini lomzi-mveliso lintsonkothile kwaye lahlukene, kwaye imfuno yezixhobo zokusebenza yahlukile. I-laser ye-laser ye-laser SLAM ye-layer multi-layer bin picking latent AGV irobhothi inokuchwetheza ngokulula ngezixhobo ezahlukeneyo, kubandakanya i-roller, ishelufa, i-AGV efihlakeleyo, indawo yokusebenza eyenziweyo kunye namanye amaqonga asebenzayo, anokuthathwa kwaye abekwe ngokukhululekileyo, kwaye anokumiswa ngokungenasiphelo. njengoko ufuna, ngoluhlu olubanzi lweemeko zesicelo.
❑ Ukuthatha kunye nokubeka ngokuthe ngqo
Inkqubo yenkxaso yerobhothi ye-laser SLAM idityanisiwe, kwaye i-AI ebonakalayo isetyenziselwa ukuphumeza ukuchola nokubeka ngokuchanekileyo, ukukhetha okukrelekrele kunye nokuphatha izixhobo, kunye nokunceda ukusebenza kakuhle kakhulu.
❑ Ukuzibamba
I-chassis ye-laser ye-laser SLAM ye-multi-layer bin picking latent AGV irobhothi ixhotyiswe ngamavili okuqhuba kunye namavili aqhutywayo. Imowudi yokwahluka kwamavili amabini yamkelwe, evumela ukuqhuba kwerobhothi kunye nokutshintsha kwendlela kwiindawo ezimxinwa. Irobhothi inokuya phambili nasemva ngokukhawuleza, kwaye inokujikeleza kwaye itshintshe indlela kuyo nayiphi na indawo kwindawo yokuqala. I-laser ye-industrial science kunye nethekhnoloji ye-laser SLAM ye-multi-layer material box pick latent AGV robot ilandela imiyalelo yokusingatha kunye nokuhamba ekhutshwe yinkqubo yokucwangcisa ikhompyutha, inokulungelelanisa isantya sokuhamba, isalathiso, ukunyathela, njl., kwaye ixhasa ukunika ingxelo ngemeko yokuhamba inkqubo yokucwangcisa, ukuze kuphunyezwe ukuphathwa kokuzimela okungaqhutywanga. Iindlela ezininzi zokhuseleko zerobhothi ngokwayo zinokuqinisekisa ukhuseleko lwabasebenzi kunye neerobhothi kwinkqubo yokuphatha ngokuzimeleyo.
❑ Ukuzihlawulela ngokwakho
Itekhnoloji ye-laser ye-laser SLAM ye-multi-layer material box echola i-latent AGV irobhothi inokuqonda umsebenzi wokuzitshaja. Xa amandla e-robot ephantse aphelile, ilizwi likhuthaza ukuba amandla awanelanga, kwaye i-robot iya kuhamba ngokuzenzekelayo kwindawo yokuhlawula imfumba ngokomyalelo okhutshwe yinkqubo yokuthumela. Indawo yokutshaja yerobhothi iqhagamshelwe ngempumelelo kunye nemfumba yokutshaja ukuqalisa ukutshaja. Irobhothi inesekethe yokukhusela yokutshaja eyakhelwe-ngaphakathi ukuqinisekisa ukutshaja kwayo ngokukhuselekileyo. Emva kokuba igcwaliswe ngokupheleleyo, irobhothi iya kuyeka ukutshaja ngokuzenzekelayo.

❑ Ukhuseleko lokhuseleko
I-laser ye-industrial technology laser SLAM ye-multi-layer material box picking latent AGV robot inemisebenzi emininzi yokukhusela ukhuseleko ukuqinisekisa ukusebenza okukhuselekileyo nokuthembekileyo kwabasebenzi kunye nenkqubo yonke.
❑ Ukukhangela ngendlela ekhuselekileyo
I-laser ye-laser ye-laser kunye ne-teknoloji ye-laser SLAM ye-multi-layer bin picking latent AGV irobhothi yakhiwe ngesilawuli se-SRC esiphuhliswe yi-Xiangong Intelligence, ebonelela irobhothi ngemisebenzi esisiseko efana nokwakhiwa kweemephu, ukubeka, ukuhamba, ukucwangcisa oomatshini abaninzi, ukutshaja ngokuzenzekelayo, umqobo we-3D. ukuphepha, njl. njl., iqonda indlela ekhuselekileyo yokukhangela, ikhusela ukhuseleko lwabasebenzi, kwaye ifanelekile kumatshini oxubeneyo nomatshini wokusingqongileyo, okrelekrele ngakumbi kwaye usebenza kakuhle.
❑ Isivusi esivakalayo nesibonwayo kunye nelizwi elikhawulezayo
I-laser ye-industrial technology laser SLAM i-multi-layer bin picking latent AGV irobhothi ibonelela nge-alamu evakalayo kunye nomsebenzi obonakalayo, kwaye abasebenzisi banokwazi isimo sokusebenza kwerobhothi ngexesha langempela ngokusebenzisa ulwazi oluvakalayo kunye nolwazi olubonakalayo.
❑ Ukhuselo lokhuseleko lokumisa okungxamisekileyo
Ukuze kuqinisekiswe ukhuseleko lwerobhothi kunye nabaqhubi, umzimba werobhothi uxhotyiswe ngamaqhosha amane okumisa okungxamisekileyo, ngokulandelanayo ngasekhohlo nangasemva kweqokobhe le-chassis, kwaye kumacala omabini ekholamu zokuphakamisa ekhohlo nasekunene. Ukhuseleko lokumisa ukhuseleko olungxamisekileyo lunokwandisa ukhuseleko lwabasebenzi kunye nezixhobo kwiimeko ezahlukeneyo ezingxamisekileyo. Cinezela iqhosha lokumisa likaxakeka ukuqalisa ukhuseleko lokumisa olungxamisekileyo, kwaye ujikelezise iqhosha ngasekunene ukuseta kwakhona iqhosha lokumisa likaxakeka.
❑ Ukuphakamisa ukhuseleko
Isixhobo sokudibanisa i-anti falling electromechanical interlocking, esiphantsi kwekholamu yokuphakamisa kwicala lasekunene lerobhothi, sisetyenziselwa ukuthintela ukunyuswa nokuwa xa abasebenzi bolondolozo belungisa irobhothi. Xa isitshixo sokuphakamisa i-anti falling sijikelwa kwindawo "yokutshixa i-lifting", i-robot yokunyusa i-robot ingena kwindawo yokutshixa, indlela yokuphakamisa iyayeka, kwaye isekethe yombane iyanqunyulwa ukubonelela ukhuseleko oluphindwe kabini. Xa isitshixo sokunyusa esichasene nokuwa sitsalwa kwigiya "yokuphakamisa ukuvula", imotor yokunyusa iphinda iqalise isenzo sokuphakamisa esiqhelekileyo. Xa abasebenzi bolondolozo besenza ulolongo lwesiqhelo kunye nokucombulula ingxaki kwirobhothi, kufuneka bajike isitshixo sokunyuswa kwe-anti falling kwindawo “yokuphakamisa isitshixo” ukukhusela ifolokhwe ekuweni nokukhusela ukhuseleko lwabasebenzi.
❑ Ukhuseleko lokungqubana
Imiphetho yangaphambili nengasemva ye-chassis ye-laser ye-laser SLAM ye-multi-layer bin picking latent AGV irobhothi ngokulandelelana ixhotyiswe ngokhuseleko lokhuseleko lokungqubana kwerobhothi, enokukhusela ngokufanelekileyo ukhuseleko lwerobhothi kunye nabasebenzi. Xa umqobo ungaphantsi kunobude bokubona imodyuli yokuphepha umqobo we-laser radar, inokubetha uqhagamshelwano olukhuselekileyo lwerobhothi. Xa ubetha umqobo, umnxeba wokhuseleko ucinezelwe kwaye ulwazi luthunyelwa kwisiphaluka solawulo, kunye ne-robot i-brakes engxamisekileyo kwaye ingena kwimodi yokukhusela. Ngeli xesha, ukukhanya okubomvu okuphezulu kukhanya ixesha elide, izibane zesalathisi zangaphambili nangemuva ze-chassis zivuliwe, kwaye i-buzzer ithumela isandi esiqhubekayo se-alamu ye-drip, ehamba kunye ne-voice prompt.
❑ Unxibelelwano lwenethiwekhi
I-laser ye-industrial technology laser SLAM multi-layer bin picking latent AGV irobhothi ixhasa i-Wi Fi okanye i-5G kunye nezinye iindlela zonxibelelwano. Inokudityaniswa neqonga lolawulo olukrelekrele ngokusebenzisa inethiwekhi engenazingcingo, enokubeka iliso kwimo yokusebenza kunye nemeko yempilo yerobhothi ngexesha langempela. Xa kwenzeka okungafaniyo, i-robot ibika ulwazi olukhethekileyo kwiqonga lolawulo olukrelekrele ngokusebenzisa inethiwekhi, kwaye amagcisa anokusombulula ingxaki ngokwelogi kunye nolunye ulwazi.
❑ Ulawulo olukrelekrele
I-laser ye-industrial technology laser SLAM multi-layer bin picking latent AGV irobhothi yirobhothi ekrelekrele kakhulu exhasa ukufikelela kwiqonga lolawulo olukrelekrele kunye neqonga lolawulo lomntu wesithathu. I-platform yokulawula ingqiqo yingqondo ehlakaniphile ye-robot, enokudibanisa nenkqubo yokulawula yangaphandle, inkqubo yeenkqubo ezifanelekileyo zoshishino, ukuqhuba uhlalutyo lwedatha kunye nolawulo olubonakalayo; Ukuqinisekisa ukucwangciswa kwexesha lokwenyani kweerobhothi ezininzi kunye nezixhobo ezahlukeneyo zolungiselelo, ukuqonda ukuqikelelwa kunye nokubekwa esweni kwempilo yenkqubo, kunye nokwandisa inkqubo esekwe ekomelezeni ukufunda kunye nokufunda nzulu. Iqonga lolawulo olukrelekrele linokuqonda ukugcinwa kwezinto ezikrelekrele, indawo yokugcina impahla kunye neminye imisebenzi. Umsebenzisi ufuna kuphela ukucofa iqhosha lokusebenza kwi-software interface, kwaye irobhothi iya kugqiba ngokuzimeleyo imisebenzi eyahlukeneyo yomyalelo phantsi kwenkqubo yokucwangcisa.
I-robot yokuqala ye-laser SLAM ye-multi-layer bin iqaliswe ngokudibeneyo yi-HEGERLS kunye ne-HAIROO Innovation iya kudlala indima ebalulekileyo ekuphatheni kwecala lomgca, ukufezekisa i-docking eguquguqukayo phakathi kwezixhobo zokuvelisa kunye nokusebenza kakuhle kwemigqomo, kunye nokudala ixabiso elikhulu kubathengi. Kwangaxeshanye, kwisicwangciso sentsebenziswano esitsha phakathi kwe-HEGERLS kunye ne-HAIROO, i-HEGERLS iye yazisa iindidi ezininzi zeerobhothi ze-Kubao: i-robot ye-multi-layer bin i-HEGERLS A42, i-robot ye-double bin i-HEGERLS A42D, i-carton ikhetha irobhothi HEGERLS A42N, i-telescopic yokuphakamisa i-bin robot. I-HEGERLS A42T, ngokuthe ngcembe igubungela iimeko ezahlukeneyo zokusetyenziswa kweerobhothi zokugcina iibhokisi, zijolise ekuxazululeni iintlungu ezininzi zokugcina, kunye nokubonelela abathengi ngokunyuka kwexabiso. Kwixesha elizayo, la macala mabini aya kuqhubeka nokuphonononga amathuba angakumbi okwenziwa kobukrelekrele kunye nokugcinwa kwezinto ezikrelekrele ukuze kuphuhliswe uphuhliso olufanayo.
Ixesha lokuposa: Nov-02-2022